项目名称:具有视觉功能的遥控巡逻机器人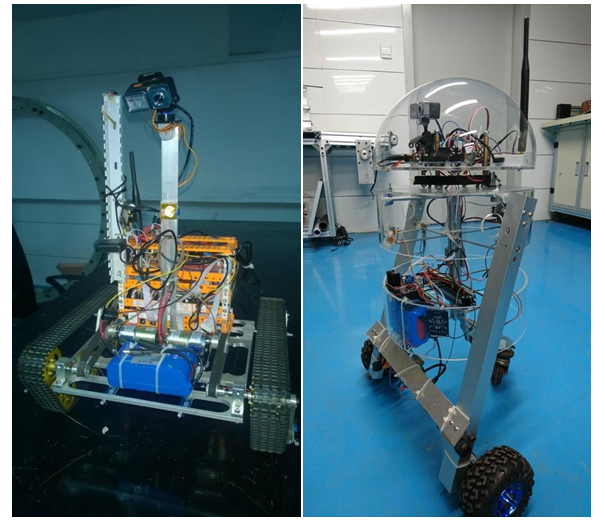
图1 一代巡逻机器人 图2 二代巡逻机器人
本项目作品为具有视觉功能的遥控巡逻机器人,机器人的外形为小车的模型,第一代采用履带的方式进行行走、第二代改为轮式结构行走。在小车身上安装了多种传感器模块(温湿度传感器、角度传感器、红外传感器、GPS模块、图像模块、Wi-Fi 模块等),能与电脑进行连接,并进行视频和控制信号的交互。电脑上位机可以控制机器人的行走、摄像头的拍摄角度、接收温湿度传感器反馈的数据,数据传输通过连接校园 Wi-Fi 网络进行,可以实现远程遥控。该巡逻机器人具有以下功能:可在多变路况进行巡逻勘察、能将巡逻的状况以视频方式反馈到电脑、可检测现场温湿度、可检测火灾。该巡逻机器人可以应用在学校、工厂、社区以及其周边环境的巡逻,能有效地代替现有的保安完成并更加出色地完成巡逻工作。

图3 远程控制客户端
项目类型:汕头大学十二届“挑战杯”大学生课外学术科技作品竞赛
项目时间:2016 年 3 月-2017 年 3 月
项目经费:1000 元(校级) 项目导师:赵永杰教授
项目成员:卢剑波、肖雪、周志强、莫乙帆、冯文城、罗泓铸