项目名称:基于快递行业小包裹分拣四轴机械臂
项目类型:大学生创新创业训练计划项目
项目时间:2014年 6月-2015 年5月
项目经费:8000元(省级)
项目导师:包能胜教授
项目成员:李伯贵、郑永宣、黄辉龙、李润丰、陈贤碧
项目理念:
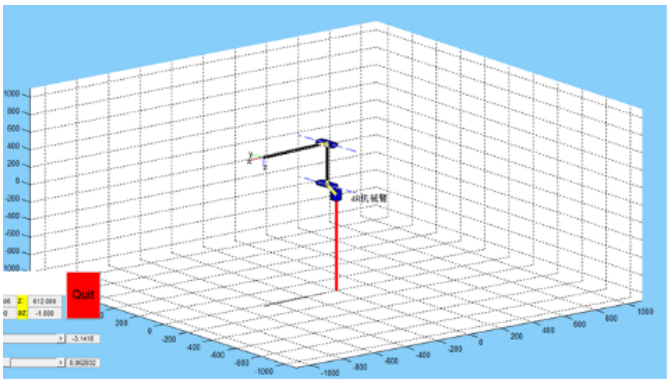
本方案将采用四个轴,四轴
机械手灵活而又实用,根据实际
的工作来确定四轴,使得机械手
运动更加自由,其最初目标为解
决快递行业中的分拣作业,协助
工人完成繁琐而费劲的分拣工
作。
本方案采用新型的人机操
作界面,能够完成在做出各种过程中各种参数的实时监控等,提高了
动作效果。
本方案的机械手试验平台框架利用弹性扣件连接于直角块连接
等多种新型连接方式,使得制作更加方便,而且拆装时更加的简洁。
相比于六轴机械手,四轴机械手更有实在意义,减少不必要的自
由度浪费。四轴机械手的第一个关节能像四轴机械手一样在水平面自由旋转,后两个关节能在垂直平面移动。此外,四轴机械手有一个“手
臂”,具有固定个“腕”关节,这让它具有人类的手臂和手腕类似的
能力。四轴机械手更多的关节意味着他们可以拿起水平面上任意朝向
的部件,以特殊的角度放入包装产品里。即可以执行许多由熟练工人
才能完成的操作。