新式食品包装机作品介绍
项目名称:新式食品包装机
项目成员:朱鸿杰、郑文轩、冯显钧、傅华亮、袁旺胜、赖宽、温水金
指导老师:范颖晖
立项时间:2014届一级项目
项目成果:
完成了分袋部分的功能设计,能够较好的实现分袋,并拍摄了视频进行记录。
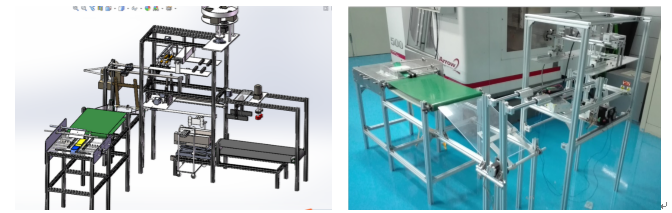
图1-总体设计图 图2-总体实物图
项目简介:
本次所设计的新型食品包装机,共分为三大部分,由九个机构组成,总占地约4个平方米,呈90度直角布置,并向空间延伸。包装机所包含的九大机构分别是:分袋机构、提袋机构、夹带机构、开袋机构、下层夹袋机构、下料机构、沉袋机构、移袋机构以及热封机构。
分袋机构设计:分袋机构主要采用直流电机作为驱动源,驱使同步轮以及硅胶轮分别带动传动带以及摩擦带作旋转运动,使袋垛上的袋子能够按照既定速度一个个分离出来。
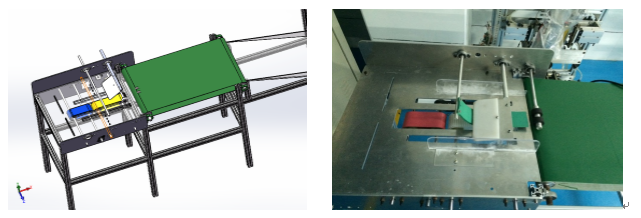
图3-分袋机构设计图 图4-分袋机构实物图
提袋结构设计:提夹袋机构主要采用的是步进电机及气缸作为驱动源。其中,步进电机驱使摆杆做旋转运动,通过摆杆上的真空吸盘将袋子从倾斜放置的玻璃板上吸起来并定轴旋转至于地面垂直,这时候导轨上的两个气缸动作,将摆杆上的袋子交换至气缸,通过曲柄滑块机构,使袋子沿导轨水平运动至下个机构所在的位置,为下一步动作做准备。
开袋机构设计:开袋机构主要采用的驱动源仍是步进电机和气缸。通过双气缸背靠背的方式使得两个镜像安装的开袋装置能够实现相对运动,实现将从前一个装置运送过来的袋子通过夹柱夹持的动作,接着开袋装置上的步进电机运动,通过一对直齿轮相互啮合的方式,使与之配合的两根轴分别沿顺、逆时针定轴旋转,与轴固连的摆杆把旋转运动转化直线滑块的往复运动,实现松袋的功能,从而使得后续的真空吸盘开袋更为顺利。另一端同样布置了四根夹柱,则是为了在下料时夹稳袋子。
夹袋机构设计: 下层夹袋机构主要采用的驱动源是步进电机。将两组机械手及其驱动装置安装在一块铝板上,铝板下方固定两个直线滑块,齿条固定在铝型材上。通过步进电机驱动齿轮转动,带动整个装置做水平往复运动,将开好袋口的袋子运动至下料机构下方进行下料。机械手则采用一对直齿轮相互啮合的方式,步进电机电机轴上安装锥齿轮,驱动另外一个与直齿轮同轴的伞齿轮,从而实现机械手夹持包装袋动作。
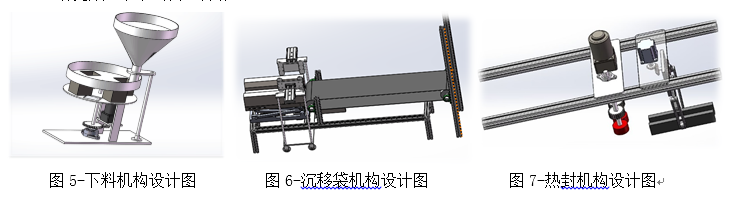
下料机构设计: 下料机构主要是采用直流电机驱动完成定量及下料两个动作。
沉袋移袋机构设计: 沉移袋机构采用的驱动源主要是气缸、直流电机以及步进电机。通过气缸控制升降台的上下运动,将正在下料的包装袋托住,避免因为物料过重而导致包装袋下滑。当完成下料操作时,升降台下沉至与传动带等高,这时安装在升降台两侧的气缸运动,夹着完成充填的包装袋通过步进电机的驱动往右运送至传送带边缘,最终完成沉袋和移袋的动作
热封机构设计: 热封机构主要采用步进电机和直流电机作为驱动源。通过机械手将袋子扶正便于后面的热封。热封装置采用的方式则是滚轮式热封,通过直流电机驱动两个电热装置旋转运动完成包装袋的封口操作。